
معیار انتخاب رباتها
ربات صنعتی چیست؟
تعریفی که برای ربات صنعتی ارائه شده است:
یک ربات صنعتی، یک بازوی مکانیکی با قابلیت کنترل خودکار، برنامهریزی و چندکاره برای استفاده در اتوماسیون صنعتی است که دارای 3 یا تعداد بیشتری محور قابل برنامه ریزی میباشد و ممکن است دارای محل استقرار ثابت و یا سیار (mobile) باشد.
معیار انتخاب رباتها
برای انتخاب ربات برای یک کاربرد خاص موارد زیر لازم است در نظر گرفته شوند:
- تعداد محورها
- ساختار ربات
- ظرفیت حمل بار ربات
- فضای کاری و فضای قابل دسترسی
- تکرارپذیری
نوع ساختار و تعداد محورها تاثیر مهمی روی عملکرد یک ربات دارد، که همانطور که ادامه توضیح داده میشود، سبب میشود یک ساختار را برای کاربردهای خاص مناسبتر کند. به عنوان مثال، ساختار SCARA برای کارهای مونتاژی که به سرعت و تکرار بالا نیاز دارند، مناسب است.
ظرفیت حمل بار یا تحمل وزن: معمولاً حداکثر باری است که می توان روی فلنج مخصوص نصب ابزار در انتهای ربات تحمل کرد.
تکرارپذیری: تکرارپذیری مشخص شده برای یک ربات معمولاً تکرارپذیری نقطه ای است اما در برخی موارد تکرارپذیری مسیر نیز بیان می شود. لازم به ذکر است که ربات ها اگرچه قابل تکرار هستند اما ذاتا دقیق نیستند. بیشتر رباتها به دلیل ساختارشان، قادر به حرکت به یک موقعیت فرماندهی شده دقیق نیستند، به عنوان مثال، مختصات XYZ در فضا، اما به طور مداوم یک موقعیت آموزش داده شده را در محدوده خطای مشخص شده توسط تکرارپذیری آنها تکرار میکنند. تکرارپذیری نقطه ای برای جوشکاری نقطه ای، جابجایی، مونتاژ و انواع کاربردهای مشابه مفید است اما برای کاربردهای فرآیندی مانند جوشکاری و چسب زنی، تکرارپذیری مسیر مفیدتر است.
فضای کاری: مجموعه ای از تمام نقاطی است که ربات قابلیت دسترسی به آنها را دارد.
انواع ربات صنعتی از نظر ساختاری
ربات صنعتی یک ساختار دارای مفصل است که میتواند پیکربندی های متفاوتی داشته باشد.
- مفصلی (articulated)
- اسکارا (SCARA)
- کارتزین
- موازی (یا دلتا)
- استوانه ای
این ساختارها و مزایای آنها در ادامه بحث خواهند شد. هر ساختار از اتصال تعدادی مفصل چرخشی یا خطی به دست میآید.
ربات مفصلی
رایجترین نوع پیکربندی، بازوی مفصلی است. این ساختار شبیهترین به بازوی انسانی میباشد و بسیار انعطافپذیر است.
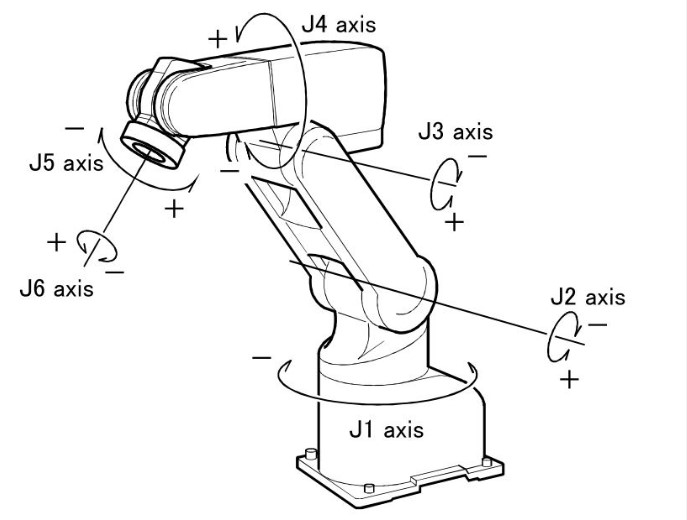
این نوع رباتها عموما ماشینهای ۶ محور میباشند. گاهاً ماشینهای ۷ محور نیز برای داشتن افزونگی در سیستم و در نتیجه کار کردن در فضاهای پیچیده موجود هستند. این ساختار از ۶ محور چرخشی، که هر یک روی مفصل قبلی سوار شده است، تشکیل میشود. با استفاده از این رباتها میتوان به هر نقطه ای از فضا، در فضای کاری و از هر زاویه ای دست پیدا کرد.شماری از این رباتها نیز وجود دارند که دارای ۴ بازوی مفصلی هستند. این ربات ها برای کاربردهای خاصی مانند پالتایزینگ، بسته بندی، جابجائی اشیاء (pick and place) طراحی شدهاند که نیازی به تغییر زاویه ابزار سر ربات ندارند. بنابراین، دو محور سر ربات مورد نیاز نیستند. این ربات ها امکان دستیابی به سرعت های بالاتر با قدرت حمل بارهای سنگین تر در مقایسه با ماشینهای 6 محور همرده خود را دارند.
ربات SCARA
پیکربندی اسکارا ویژگیهای متفاوتی را به ربات های مفصلی اضافه می کند. این ساختار برای کاربرد مونتاژ (assembly) توسعه داده شد، بنابراین نام Selective Compliance Assembly Robot (ربات مونتاژ منطبق بر انتخاب) برای آن در نظر گرفته شد که نام SCARA کلمه اختصاری این کلمات است. Selective Compliance به این معناست که ربات در دو محور x و y انعطافا پذیر است و در راستای محور z صلب است.
چهار محور این ربات شامل یک چرخش پایه، یک حرکت عمودی خطی و به دنبال آن دو حرکت چرخشی در همان صفحه عمودی میباشد. این ربات توانایی کار کردن در سرعتهای بالا و شتاب بالا را دارد و همچنین دقت بسیار بالایی میتواند داشته باشد.
ماشینهای اسکارا اغلب کوچک هستند و بیشترین باری که می توانند حمل کنند در حدود ۲ کیلوگرم با طول دسترسی حدود یک متر است. کاربرد این رباتها عموما برای مونتاژ است ولی برای کاربردهایی مانند بسته بندی، بارگذاری در پرس های کوچک، چسب زنی و سایر کاربردها نیز قابل استفاده هستند. کاربرد این ربات ها به دلیل اندازه آنها و محدودیت آنها در ۴ محور محدود است.
ربات کارتزین
دسته رباتهای کارتزین شامل تمام ربات های صنعتی است که تنها از درایوهای خطی برای سه محور اصلی استفاده میکنند و حرکت ربات در سیستم مختصات کارتزین صورت میگیرد. به عبارت سادهتر این رباتها تنها در جهات کارتزین x و y و z و به صورت خطی حرکت دارند. مدل خاصی از این ربات ها که دارای دو پایه برای محور x هستند و محور y که در بین این دو پایه حرکت میکند با نام رباتهای گنتری (Gantry Robots) نیز شناخته میشوند.
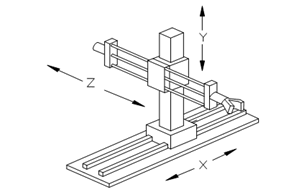
کاربردهای این ربات بسیار متنوع است اگرچه معمولاً برای جابجایی، پالتایزینگ، قالبگیری پلاستیک، مونتاژ و همکاری با ماشین آلات استفاده میشوند. آنها همچنین برای فرآیندهایی مانند جوشکاری و چسب زنی، به ویژه در قطعات بسیار بزرگ کاربرد دارند.